Masking HEALPix datasets¶
For users who do not want to simulate and fit a full sky map (e.g., to remove confusing regions) or who need patches of a HEALPix map at high resolution, IMAGINE has a Masks class derived from ObservableDict. It also applies the masks correctly not only to the simulation but also the measured data sets and the corresponding observational covariances.
[1]:
import numpy as np
import healpy as hp
import imagine as img
import astropy.units as u
import imagine.observables as img_obs
from imagine.fields.hamx import BregLSA, TEregYMW16, CREAna
Creating a Mask dictionary¶
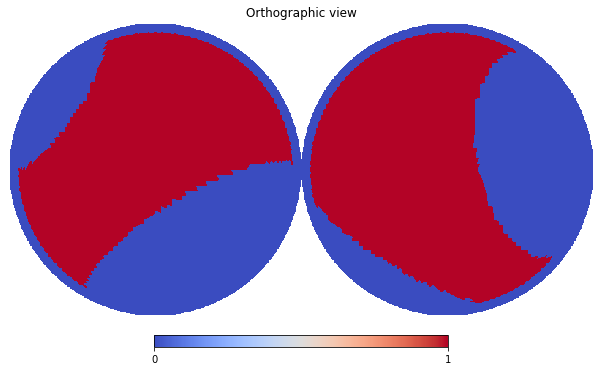
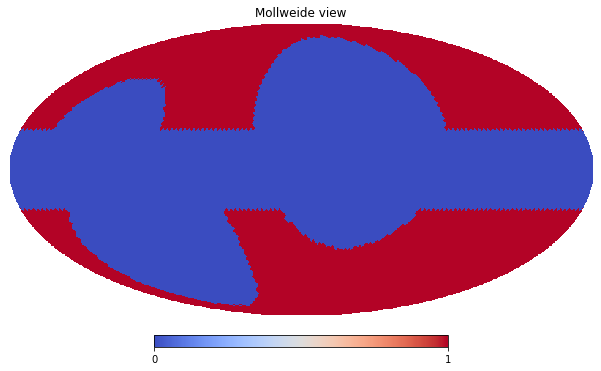
First of all, make an example, let’s mask out low latitude \(|l| < 20^\circ\) pixels and those inside four local loops
[2]:
mask_nside = 32
def mask_map_val(_nside,_ipix):
"""Mask loops and latitude"""
l,b = hp.pix2ang(_nside,_ipix,lonlat=True)
R = np.pi/180.
cue = 1
L = [329,100,124,315]
B = [17.5,-32.5,15.5,48.5]
D = [116,91,65,39.5]
#LOOP I
if( np.arccos(np.sin(b*R)*np.sin(B[0]*R)+np.cos(b*R)*np.cos(B[0]*R)*np.cos(l*R-L[0]*R))<0.5*D[0]*R ):
cue = 0
#LOOP II
if( np.arccos(np.sin(b*R)*np.sin(B[1]*R)+np.cos(b*R)*np.cos(B[1]*R)*np.cos(l*R-L[1]*R))<0.5*D[1]*R ):
cue = 0
#LOOP III
if( np.arccos(np.sin(b*R)*np.sin(B[2]*R)+np.cos(b*R)*np.cos(B[2]*R)*np.cos(l*R-L[2]*R))<0.5*D[2]*R ):
cue = 0
#LOOP IV
if( np.arccos(np.sin(b*R)*np.sin(B[3]*R)+np.cos(b*R)*np.cos(B[3]*R)*np.cos(l*R-L[3]*R))<0.5*D[3]*R ):
cue = 0
#STRIPE
if(abs(b)<20.):
cue = 0
return cue
mask_map = np.zeros(hp.nside2npix(mask_nside))
for i in range(len(mask_map)):
mask_map[i] = mask_map_val(mask_nside, i)
# Presents the generated mask map
hp.orthview(mask_map, cmap='coolwarm', rot=(0,90))
hp.mollview(mask_map, cmap='coolwarm')
/home/lrodrigues/miniconda3/envs/imagine/lib/python3.7/site-packages/healpy/projaxes.py:211: MatplotlibDeprecationWarning: Passing parameters norm and vmin/vmax simultaneously is deprecated since 3.3 and will become an error two minor releases later. Please pass vmin/vmax directly to the norm when creating it.
**kwds
The procedure to include the above created mask in a Masks dictionary is the same as the Measurements (at the moment, the is no helper equivalent to the Dataset, but this should not be an issue).
[3]:
masks = img_obs.Masks()
masks.append(name=('sync', 23.0, 32, 'I'), data=np.vstack([mask_map]))
Applying Masks directly¶
Typically, after setting the masks, we supply them to the Likelihood and/or Simulator classes, which allow them (see section below) to be used in the pipeline run.
Nevertheless, to understand or check what is going on internally, we can apply it ourselves to a given Observable. To illustrate this, let us first generate a mock synchrotron map using Hammurabi (using the usual trick).
[4]:
from imagine.simulators import Hammurabi
# Creates empty datasets
sync_dset = img_obs.SynchrotronHEALPixDataset(data=np.empty(12*32**2)*u.K,
frequency=23, typ='I')
# Appends them to an Observables Dictionary
fakeMeasureDict = img_obs.Measurements()
fakeMeasureDict.append(dataset=sync_dset)
# Initializes the Simulator with the fake Measurements
simulator = Hammurabi(measurements=fakeMeasureDict)
# Initializes Fields
breg_wmap = BregLSA(parameters={'b0': 6.0, 'psi0': 27.9,
'psi1': 1.3, 'chi0': 24.6})
cre_ana = CREAna(parameters={'alpha': 3.0, 'beta': 0.0,
'theta': 0.0,'r0': 5.6, 'z0': 1.2,
'E0': 20.5, 'j0': 0.03})
fereg_ymw16 = TEregYMW16(parameters={})
# Produces the mock dataset
maps = simulator([breg_wmap, cre_ana, fereg_ymw16])
observable {}
|--> sync {'cue': '1', 'freq': '23', 'nside': '32'}
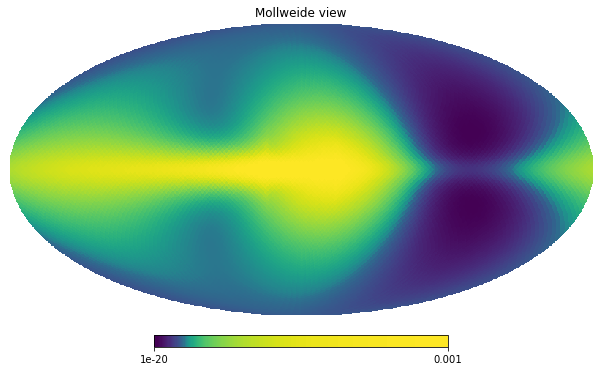
We can now inspect how this data looks before the masking takes place
[5]:
unmasked_map = maps[('sync', 23.0, 32, 'I')].data[0]
hp.mollview(unmasked_map, norm='hist', min=1e-20, max=1.0e-3)
/home/lrodrigues/miniconda3/envs/imagine/lib/python3.7/site-packages/healpy/projaxes.py:920: MatplotlibDeprecationWarning: You are modifying the state of a globally registered colormap. In future versions, you will not be able to modify a registered colormap in-place. To remove this warning, you can make a copy of the colormap first. cmap = copy.copy(mpl.cm.get_cmap("viridis"))
newcm.set_over(newcm(1.0))
/home/lrodrigues/miniconda3/envs/imagine/lib/python3.7/site-packages/healpy/projaxes.py:921: MatplotlibDeprecationWarning: You are modifying the state of a globally registered colormap. In future versions, you will not be able to modify a registered colormap in-place. To remove this warning, you can make a copy of the colormap first. cmap = copy.copy(mpl.cm.get_cmap("viridis"))
newcm.set_under(bgcolor)
/home/lrodrigues/miniconda3/envs/imagine/lib/python3.7/site-packages/healpy/projaxes.py:922: MatplotlibDeprecationWarning: You are modifying the state of a globally registered colormap. In future versions, you will not be able to modify a registered colormap in-place. To remove this warning, you can make a copy of the colormap first. cmap = copy.copy(mpl.cm.get_cmap("viridis"))
newcm.set_bad(badcolor)
The masks object acts as a function that takes an observable dictionary (i.e. Measurements, Covariances or Simulations) and returns a new ObservablesDict with relevant maps already masked.
[6]:
# Creates the masked map(s)
new_maps = masks(maps)
# Stores it, for conveniency
masked_map = new_maps[('sync', 23.0, 4941,'I')].data[0]
Applying a mask, however, changes the size of the data array
[7]:
print('Masked map size:', masked_map.size)
print('Orignal map size', unmasked_map.size)
Masked map size: 4941
Orignal map size 12288
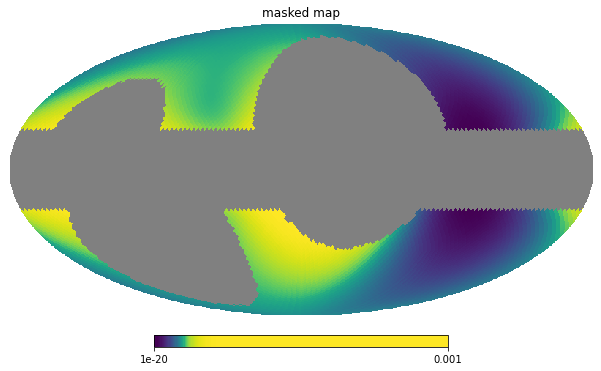
This is expected: the whole point of masking is not using parts of the data which are unreliable or irrelevant for a particular purpose.
However, if, to check whether things are working correctly, we wish to look at masked image, we need to reconstruct it. This means creating a new image including the pixels which we previously have thrown away, as exemplified below:
[8]:
# Creates an empty array for the results
masked = np.empty(hp.nside2npix(mask_nside))
# Saves each pixel `raw_map` in `masked`, adding "unseen" tags for
# pixels in the mask
idx = 0
for i in range(len(mask_map)):
if mask_map[i] == 0:
masked[i] = hp.UNSEEN
else:
masked[i] = masked_map[idx]
idx += 1
# Shows the image
hp.mollview(masked, norm='hist', min=1e-20, max=1.0e-3, title='masked map')
Using the Masks¶
The masks affect (separately) two aspects of the calculation: they can influence the Likelihood object, making it ignoring the masked parts of the maps in the likelihood calculation; and they can change the behaviour of the Simulator object, allowing it to ignore the masked pixels while computing the simulated maps.
Masks in likelihood calculation¶
To use the masks in the likelihood calculation, they should be supplied while initializing the Likelihood object, as an extra argument, for example:
[9]:
likelihood = img.likelihoods.SimpleLikelihood(fakeMeasureDict, mask_dict=masks)
When a mask is supplied, the likelihood object stores internally only the masked version of the Measurements, which can be checked in the following way:
[10]:
likelihood.measurement_dict.keys()
[10]:
dict_keys([('sync', 23, 4941, 'I')])
Masks with the Hammurabi simulator¶
To set-up Hammurabi to use masks, it is sufficient to initialize the simulator providing the masks using the masks keyword argument. However, there a subtlety: while Hammurabi X does support masks, there is only a single mask input entry, which means all outputs will be masked by the same mask.
Thus, the masks provided to the IMAGINE Hammurabi simulator must cover all Hammurabi-compatible observables and (currently) they must be identical (including having the same resolution, in the future, however, IMAGINE will support compatible masks of different resolutions to be applied).
[11]:
# Initializing Hammurabi including the masks
simulator = Hammurabi(measurements=fakeMeasureDict, masks=masks)
observable {}
|--> sync {'cue': '1', 'freq': '23', 'nside': '32'}
[12]:
# Re-runs the simulator which is using the mask internally
maps = simulator([breg_wmap, cre_ana, fereg_ymw16])
# Shows the new map
hammurabi_masked = maps[('sync', 23.0, 32,'I')].data[0]
hp.mollview(hammurabi_masked, norm='hist', min=1e-20, max=1.0e-3,
title='Hammurabi masked output')
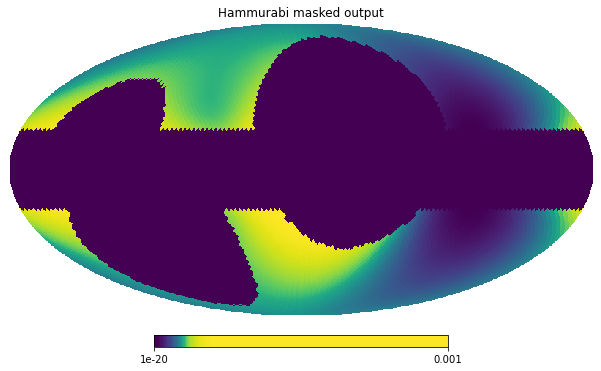
We see that, when the masks are used by Hammurabi, the simulator does not do any work on the masked pixels and they receive 0 in the output produced.
Masking NaNs¶
A very common application of masks is the removal of invalid data. Here we illustrate how to construct a Masks object which can be used to make IMAGINE to ignore any pixels containing nans or infs.
We begin by creating a Measurements object containing some NaNs in one of its datasets.
[13]:
meas_with_NaNs = img.observables.Measurements()
meas_with_NaNs.append(name=('a', None, 5, None),
data=np.array([[1.,2.,3.,np.nan,5.]]),
otype='plain')
meas_with_NaNs.append(name=('b', None, 6, None),
data=np.array([[1,np.nan,3,4,5,np.inf]]),
otype='plain')
meas_with_NaNs.append(name=('c', None, 4, None),
data=np.arange(4).reshape((1,4)),
otype='plain')
This Measurements object contains 3 datasets, two of them containing Now, let us create our NaN removing Masks object.
[14]:
masks = img.observables.Masks()
for k in meas_with_NaNs:
mask = np.isfinite(meas_with_NaNs[k].data)
if np.all(mask):
# Everything is valid, no need for a mask!
continue
else:
masks.append(name=k, data=mask)
One can now safely provide our masks object to a Likelihood object using the mask_dict keyword argument, and the NaNs and infs will be removed consistently both from the original meas_with_NaNs and the Simulations object generated by the simulator during any operation of the IMAGINE Pipeline.